第5章:中央处理器
Note
中央处理器(Central Processing Unit,CPU)是计算机的核心部件,负责执行指令和控制整个计算机系统的运行。本章从处理器基本结构入手,深入分析指令执行过程、数据通路设计、流水线技术以及控制单元的实现方式,最后通过典型处理器的分析,帮助读者理解现代计算机处理器的设计原理与实现技术。
本章要点:
- 处理器数据通路的组成与时钟控制
- 指令流水线的基本概念与实现
- 流水线冒险的类型与处理方法
- 处理器控制方式(硬布线与微程序)
- 典型处理器的结构与特点
5.1 处理器数据通路与时钟
5.1.1 处理器的功能与组成
处理器是计算机系统的核心,负责解释和执行指令。根据冯·诺依曼结构的规定,程序和数据都存储在存储器中,处理器从存储器中取出指令、分析指令并执行指令,完成各种算术逻辑运算和数据传输操作。
处理器主要由以下几个部分组成:
1. 运算单元
运算单元是处理器的执行核心,负责完成各种算术运算和逻辑运算。主要包括:
- 算术逻辑单元(ALU):执行加、减、乘、除等算术运算,以及与、或、非、异或等逻辑运算
- 移位器:对数据进行移位操作,包括算术移位、逻辑移位和循环移位
- 乘除法器:专门处理乘法和除法运算(在简单处理器中可能由ALU通过多次加法实现)
2. 寄存器组
寄存器是处理器内部的高速存储单元,用于暂存指令操作数、中间结果和控制信息。典型处理器包含以下寄存器:
- 通用寄存器:存放程序运行过程中的临时数据
- 专用寄存器:具有特定用途,如程序计数器(PC)、指令寄存器(IR)、状态标志寄存器(FLAGS)等
- 堆栈指针(SP):指向调用栈的顶端,用于函数调用和返回
3. 控制单元
控制单元负责协调各部件工作,产生控制信号序列以完成指令的执行。控制单元根据指令操作码生成相应的控制信号,控制数据通路中各多路选择器、寄存器的读写操作以及ALU的运算类型。
4. 时钟与定时电路
时钟电路为处理器提供统一的时钟信号,决定各部件的工作节奏。处理器的性能很大程度上取决于时钟频率的高低。
5.1.2 处理器数据通路
数据通路(Datapath)是处理器中数据流动的路径,包括寄存器、运算单元、总线等部件。数据通路的设计直接影响处理器的性能和实现复杂度。
1. 单周期数据通路
最简单的设计是每个指令在一个时钟周期内完成执行。这种单周期(Single-cycle)数据通路的特点是:
- 时钟周期必须足够长,以容纳最复杂的指令(如乘法或除法指令)
- 每条指令执行完毕后才能开始下一条指令
- 硬件利用率较低,但控制逻辑简单
图5-1给出了一个简化的单周期MIPS处理器数据通路。该数据通路包含指令存储器、数据存储器、寄存器堆、ALU以及必要的控制线路。指令从指令存储器取出后,经过译码产生控制信号,控制数据通路中各部件的操作。
2. 多周期数据通路
为了提高硬件利用率,可以将指令执行分解为多个时钟周期,每个周期完成一部分工作。这种多周期(Multi-cycle)数据通路的特点是:
- 时钟周期较短,只需满足基本操作的时间需求
- 不同指令需要不同数量的周期完成
- 通过复用硬件部件减少资源消耗
- 控制逻辑相对复杂,需要状态机协调
多周期数据通路中,一个典型指令的执行过程包括:取指(Fetch)、译码(Decode)、执行(Execute)、访存(Memory Access)和写回(Write Back)五个阶段。
3. 流水线数据通路
流水线(Pipeline)技术将指令执行分为多个阶段,使多条指令能够同时处于不同执行阶段,从而提高指令吞吐率。流水线数据通路是现代处理器广泛采用的设计技术,将在5.2节详细讨论。
5.1.3 时钟与时序控制
时钟信号是处理器正常工作的基础,决定了各部件何时进行数据采样和状态更新。
1. 时钟周期
时钟周期(Clock Cycle)是处理器最基本的时间单元,由时钟信号的上升沿或下降沿定义。一个时钟周期内,处理器完成部分数据传送或处理操作。
时钟周期的选择需要考虑:
- 最长组合逻辑路径的延迟
- 寄存器建立时间和保持时间
- 时钟偏斜(Clock Skew)的影响
- 处理器功耗与发热
2. 同步时序与异步时序
处理器通常采用同步时序设计,所有操作都在时钟边沿同步进行。这种设计的优点是:
- 易于设计与调试
- 数字电路可靠性高
- 可以进行时序分析
异步时序在某些特定场景下使用,如处理器与外设的握手通信、高速缓存的一致性协议等。
3. 流水线寄存器
在流水线处理器中,各阶段之间需要设置流水线寄存器(Pipeline Register)来暂存阶段间的数据。流水线寄存器的设计需要考虑:
- 正确的时序控制,确保数据在时钟边沿正确传递
- 适当的寄存器级数,平衡各阶段的工作量
- 减少寄存器输出到输入的延迟,提高工作频率
5.1.4 指令执行过程
指令的执行过程涉及多个操作步骤,需要各硬件部件协同工作。以MIPS指令为例,说明指令的执行过程。
1. 取指阶段(Instruction Fetch,IF)
- 将程序计数器(PC)的值发送到指令存储器地址端口
- 从指令存储器中读取指令
- PC更新为下一条指令的地址(PC+4)
取指阶段需要使用的部件包括:PC寄存器、指令存储器、加法器(计算PC+4)。
2. 译码阶段(Instruction Decode,ID)
- 从指令中解析出操作码(Opcode)和寄存器字段
- 读取寄存器堆中的操作数
- 进行指令译码,产生控制信号
译码阶段需要使用的部件包括:指令寄存器(IR)的高位、寄存器堆、立即数扩展模块、控制单元。
3. 执行阶段(Execute,EX)
- ALU执行运算:算术逻辑运算、地址计算或分支目标计算
- 根据运算结果判断分支是否成立
执行阶段需要使用的部件包括:ALU、立即数扩展单元。
4. 访存阶段(Memory Access,MEM)
- 对于访存指令,访问数据存储器
- 对于分支指令,若条件成立则更新PC
访存阶段需要使用的部件包括:数据存储器、PC选择器。
5. 写回阶段(Write Back,WB)
- 将运算结果或访存结果写回寄存器堆
写回阶段需要使用的部件包括:寄存器堆的写端口、多路选择器。
图5-2给出了MIPS指令执行各阶段使用的主要硬件部件。
5.2 指令流水线
5.2.1 流水线技术概述
流水线是一种将重复性工作分解为多个相互关联的子任务的技术,每个子任务由专门的部件处理。处理器采用流水线技术后,多条指令可以同时执行,只是处于不同的执行阶段。
1. 流水线的基本原理
以洗衣店的工作为例说明流水线的思想:
传统方式(单周期处理器):一个人完成洗、甩干、熨烫、叠放的整个过程,然后下一批衣服才能开始。这种方式效率低下,硬件利用率不高。
流水线方式(流水线处理器):建立多条工作线,不同批次的衣服在不同阶段同时处理。第一批衣服进入熨烫阶段时,第二批衣服正在进行甩干,第三批衣服正在洗涤。这样在稳定状态下,每个时钟周期都有一批衣服完成处理。
处理器指令流水线的原理类似。将指令执行分为取指(IF)、译码(ID)、执行(EX)、访存(MEM)、写回(WB)五个阶段,每个阶段由专门的硬件部件负责。在理想情况下,流水线处理器可以在每个时钟周期完成一条指令,吞吐量是非流水线处理器的五倍。
2. 流水线的时空图
流水线的性能可以用时空图(Space-Time Diagram)直观表示。时空图的横轴表示时间(时钟周期),纵轴表示流水线的各个阶段。
图5-3展示了五级流水线在连续执行多条指令时的时空图。从图中可以看出:
- 在流水线充满之前,存在填充阶段
- 流水线充满后,每个周期都有一条指令完成
- 理想情况下,n条指令的执行时间为:填充时间 + (n-1) × 周期时间 = 5 + (n-1)个周期
3. 流水线的性能指标
流水线的性能主要用以下指标衡量:
-
吞吐率(Throughput):单位时间内完成的指令数量。理想情况下,k级流水线的吞吐率为1/周期时间,即非流水线时代的k倍。
-
加速比(Speedup):流水线处理器与非流水线处理器执行相同数量指令的时间比值。理想情况下的最大加速比为k(流水线级数)。
-
效率(Efficiency):实际加速比与理想加速比的比值,反映流水线中硬件的利用程度。由于填充和清空阶段的存在,实际效率通常低于100%。
5.2.2 经典五级流水线
经典的五级流水线是RISC处理器广泛采用的结构,将指令执行分为五个阶段。
1. IF(取指)
从指令存储器中取出指令,同时计算PC+4,为取下一条指令做准备。对于分支指令,可能需要根据分支结果修改PC。
主要硬件:PC寄存器、指令存储器、加法器。
2. ID(译码/读寄存器)
- 指令译码,解析操作码和功能码
- 读取寄存器堆中的操作数
- 立即数符号扩展或零扩展
- 产生控制信号
主要硬件:指令译码器、寄存器堆、立即数扩展单元、控制单元。
3. EX(执行/有效地址计算)
- ALU执行算术或逻辑运算
- 计算访存有效地址
- 计算分支目标地址并判断分支条件
主要硬件:ALU、零标志检测器、分支目标加法器。
4. MEM(访存)
- 对数据存储器进行读/写操作
- 对于分支指令,若条件成立则更新PC
主要硬件:数据存储器、PC选择器。
5. WB(写回)
- 将运算结果或从存储器读出的数据写回寄存器堆
主要硬件:寄存器堆写端口。
图5-4给出了经典五级流水线的结构框图。各阶段之间设置了流水线寄存器(IF/ID、ID/EX、EX/MEM、MEM/WB),用于保存各阶段产生的需要传递到后续阶段的信息。
5.2.3 流水线冒险
流水线冒险(Pipeline Hazard)是指指令流水线无法按照理想方式工作的情况。由于指令间存在相关性或资源冲突,某些指令必须暂停等待,从而降低流水线效率。
1. 结构冒险(Structural Hazard)
结构冒险是指硬件资源不足以支持所有指令组合同时执行的情况。例如: - 同一时刻,一条指令需要访问指令存储器,另一条指令需要访问数据存储器 - 同一时刻,两条指令都需要写寄存器堆
解决方案: - 分离指令存储器和数据存储器(如采用Harvard架构) - 分时复用寄存器堆的写端口 - 增加硬件资源
2. 数据冒险(Data Hazard)
数据冒险是指指令之间存在数据依赖关系,后一条指令需要使用前一条指令的结果,但结果尚未计算完成。主要有三种类型:
读后写(Read After Write,RAW):也称真实数据依赖。后一条指令需要读取前一条指令写入的数据,但前一条指令尚未完成写回。这是必须处理的冒险。
例如:
第二条指令需要读取R1的值,但第一条指令的R1结果尚未写回。
写后读(Write After Read,WAR):也称反相关。后一条指令需要写入的寄存器是前一条指令要读取的寄存器,但前一条指令还未读完。
在按序流水线中,WAR冒险不会发生,因为指令按序发射和完成。
写后写(Write After Write,WAW):也称输出相关。两条指令都向同一寄存器写入数据,后一条指令应该先于前一条指令完成写入。
在按序流水线中,WAW冒险不会发生。
3. 控制冒险(Control Hazard)
控制冒险是由于分支指令和跳转指令造成的。当执行到分支指令时,流水线需要确定下一条指令的地址,但在分支条件判断完成之前,后续指令已经进入流水线。
图5-5给出了分支指令对流水线的影响。分支目标在EX阶段才能确定,但IF阶段已经取走了后续指令。
5.2.4 流水线冒险的处理
1. 停顿(Stall)
最简单的处理方法是插入气泡(Bubble),使后续指令暂停执行。停顿会导致流水线效率下降,但实现简单。
图5-6展示了数据冒险导致的停顿。在RAW冒险中,需要插入2个时钟周期的停顿,等待前一条指令完成写回。
停顿的实现方式是在流水线寄存器中插入空操作(NOP),同时停止向流水线寄存器输入新的指令。
2. 转发(Forwarding)
转发技术也称为旁路(Bypassing),将计算结果直接从一个阶段转发到另一个阶段,而不需要等待结果写回寄存器堆。
例如,在五级流水线中,ALU的计算结果在EX阶段末尾产生,可以直接转发到下一条指令的EX阶段,而不需要等待结果写回MEM/WB寄存器。
图5-7展示了使用转发技术处理RAW冒险的流水线时序。通过从EX/MEM和MEM/WB寄存器中获取数据,避免了大部分数据冒险导致的停顿。
3. 加载互锁(Load Interlock)
加载指令的结果在MEM阶段才从数据存储器中读出,无法通过转发解决。对于紧跟在加载指令之后的指令,可能存在数据冒险,需要插入停顿。
这种加载互锁需要硬件检测并插入停顿,直到加载完成。
4. 分支预测(Branch Prediction)
分支预测是解决控制冒险的主要技术,包括:
- 静态分支预测:预测分支永远不发生或永远发生。简单但准确率低。
-
动态分支预测:根据历史行为预测,包括:
-
1位预测器:根据上次分支结果预测
- 2位饱和计数器:使用2位计数器记录分支历史,避免偶尔的错误预测影响过多
- 全局历史预测器:结合全局分支历史进行预测
- 本地历史预测器:记录每个分支自己的历史
5. 延迟分支(Delayed Branch)
延迟分支技术将分支指令与分支延迟槽(Delay Slot)结合。延迟槽中的指令无论分支是否发生都会执行,充分利用了流水线。
编译器负责调度延迟槽中的指令,通常选择:
- 调度分支前的指令
- 调度与分支无关的指令
- 调度循环中的指令
5.2.5 流水线优化技术
1. 超标量(Superscalar)
超标量处理器在每个时钟周期发射多条指令到流水线。典型配置包括2路、4路甚至更多路的超标量。
超标量处理器的挑战:
- 指令调度和并行性检测
- 多个执行单元的协调
- 乱序执行与按序提交
2. 超长指令字(VLIW)
超长指令字(Very Long Instruction Word)技术将多条指令打包成一个长指令字,由编译器负责指令调度和并行性分析。
优点:硬件简单,不需要动态调度 缺点:代码密度低,需要编译器完成复杂的依赖分析
3. 动态流水线
动态流水线允许指令乱序执行,通过硬件进行指令调度和资源分配。Intel Pentium 4处理器采用了动态流水线技术。
主要技术:
- 乱序执行(Out-of-Order Execution)
- 寄存器重命名(Register Renaming)
- 分支预测
- 指令调度
5.3 流水线冒险
5.3.1 数据冒险详解
数据冒险是流水线中最常见的冒险类型,深入理解其产生原因和处理方法对掌握处理器设计至关重要。
1. RAW冒险的产生
RAW冒险产生的原因是写后读的操作数在时间上存在重叠。当后一条指令需要读取前一条指令的目标寄存器,而前一条指令尚未完成写回时,就会产生RAW冒险。
考虑以下指令序列:
I1: ADD R1, R2, R3 # R1 ← R2 + R3
I2: SUB R4, R1, R5 # R4 ← R1 - R5
I3: AND R6, R1, R7 # R6 ← R1 & R7
在五级流水线中:
- I1的R1结果在第5个周期的WB阶段才写回
- I2在第3个周期的ID阶段需要读取R1,但R1尚未写回
- I3在第4个周期的ID阶段需要读取R1,但R1尚未写回
2. 转发路径
为了减少停顿,可以添加转发路径。处理器通常提供以下转发路径:
- ALU结果转发:从EX/MEM流水线寄存器(EX阶段输出)转发到后续指令的ALU输入
- 内存数据转发:从MEM/WB流水线寄存器(MEM阶段输出)转发到后续指令的ALU输入
- 寄存器写回转发:从寄存器堆的写端口输出转发到读端口输入
图5-8展示了完整的数据转发路径。通过这些转发路径,可以消除大部分RAW冒险导致的停顿。
3. 加载指令的延迟
加载指令(LW)的结果从数据存储器中读出,需要等到MEM阶段才能获得。即使使用转发技术,也无法直接满足后续指令对该数据的需求。
解决方法是检测加载-使用(Load-Use)冒险并插入停顿:
硬件检测逻辑:检查当前指令的源寄存器是否与前一条加载指令的目标寄存器相同。
5.3.2 控制冒险详解
控制冒险主要来源于分支指令和跳转指令。准确预测分支行为并快速确定分支方向,是提高流水线效率的关键。
1. 分支延迟槽
早期RISC处理器(如MIPS)采用分支延迟槽技术。分支指令后的一条指令总是在分支目标或 fall-through路径之间进行选择。
编译器优化准则:
- 从循环中调度指令到延迟槽
- 从分支前调度指令到延迟槽
-
使用不影响程序结果的指令填充延迟槽
-
分支预测器设计
现代处理器采用更复杂的分支预测技术:
BTB(Branch Target Buffer):缓存分支指令的目标地址,用于预测分支跳转方向和目标。
2位饱和计数器:每个分支对应一个2位计数器,状态转换如下:
- 强不跳转(00)→ 弱不跳转(01)→ 弱跳转(10)→ 强跳转(11)
- 预测错误时,计数器向相反方向移动两位
全局历史寄存器(GHR):记录最近N次分支的结果,用于预测当前分支。典型的全局预测器将GHR与分支指令地址进行哈希,形成分支历史表(BHT)索引。
局部历史表:为每个分支保存其独立的历史记录,更准确地预测具有特定行为模式的分支。
3. 混合分支预测器
现代处理器采用多种预测器的组合:
- 采用局部历史预测器和全局历史预测器
- 使用选择器决定使用哪个预测器的结果
- 感知上下文切换,清空预测器状态
5.3.3 结构冒险与其他问题
1. 结构冒险
结构冒险发生在硬件资源不足时。典型情况包括:
-
访存冲突:取指和访存同时发生
-
解决方案:分离指令Cache和数据Cache(Harvard架构)
-
寄存器访问冲突:同一周期既读又写
-
解决方案:前半周期写,后半周期读;或设置多个写端口
2. 时序问题
-
时钟偏斜:时钟信号到达不同触发器的时间存在差异,可能引起建立时间或保持时间违例
-
解决:时钟树设计、加入缓冲器、采用同步设计
-
关键路径:数据通路中最长的组合逻辑路径,决定最高工作频率
-
解决:流水线分割、并行前缀计算、电路优化
3. 功耗问题
流水线级数增加会导致:
- 流水线寄存器数量增加,动态功耗上升
- 时钟网络功耗增加
- 泄漏功耗随晶体管数量增加而增加
现代处理器的功耗管理技术:
- 动态电压频率调节(DVFS)
- 时钟门控
- 功率门控
5.4 处理器控制方式
5.4.1 控制单元概述
控制单元(Control Unit,CU)是处理器的指挥中心,负责生成控制信号序列,协调数据通路各部件完成指令的执行。
控制单元的主要功能:
- 指令译码:解析指令操作码,确定指令类型
- 控制信号生成:根据指令类型和当前状态,产生相应的控制信号
- 流程控制:控制指令执行的顺序和流程
控制单元的实现方式主要有两种:硬布线控制(Hardwired Control)和微程序控制(Microprogrammed Control)。
5.4.2 硬布线控制
硬布线控制采用组合逻辑电路直接从操作码和状态产生控制信号。这种方式类似于组合逻辑电路,输出仅由当前输入决定。
1. 设计方法
硬布线控制的设计步骤:
- 确定处理器的指令集
- 为每条指令设计执行步骤(微操作)
- 列出每个执行步骤中各部件的控制信号
- 用布尔表达式描述各控制信号的逻辑
- 用门电路实现组合逻辑
2. 微操作
微操作(Micro-operation)是处理器中最基本的不可分割的操作。常见的微操作包括:
- 寄存器传输微操作:数据在寄存器间传输,如
R1 ← R2 - ALU微操作:算术逻辑运算,如
ALU ← R1 + R2 - 访存微操作:存储器的读写,如
MA ← PC - 转移微操作:程序计数器修改,如
PC ← BR
3. 控制信号示例
以MIPS的R型指令为例,其执行过程如下:
| 阶段 | 微操作 | 控制信号 |
|---|---|---|
| IF | IR ← Mem[PC],PC ← PC + 4 | PCSrc=0, MemRead, IRWrite, PCWrite, ALUSrcA=0, ALUSrcB=01, ALUOp=00 |
| ID | A ← Reg[rs], B ← Reg[rt] | RegDst=0, RegWrite, ALUSrcA=0, ALUSrcB=10, ALUOp=00 |
| EX | ALUOut ← A op B | ALUSrcA=1, ALUSrcB=00, ALUOp=10 |
| MEM | 无操作(仅R型不访存) | — |
| WB | Reg[rd] ← ALUOut | RegDst=1, RegWrite, MemtoReg=0 |
4. 硬布线控制的优缺点
优点:
- 执行速度快,控制信号生成延迟小
- 易于流水线实现,时序分析简单
- 适合RISC处理器
缺点:
- 设计复杂,尤其是指令集较大时
- 修改困难,新指令或新功能难以添加
- 控制逻辑的调试和验证困难
5. 状态机实现
硬布线控制通常用有限状态机(FSM)实现,包括:
- 取指状态:IF
- 译码状态:ID
- 执行状态:EX(根据指令类型有多个子状态)
- 访存状态:MEM
- 写回状态:WB
每个状态包含所有控制信号的输出值,状态转移由指令类型和标志位决定。
5.4.3 微程序控制
微程序控制采用存储技术,将控制信号序列存储在控制存储器(Control Memory)中,通过微指令的解释执行来产生控制信号。
1. 基本原理
微程序控制的核心思想是:将每条机器指令的执行过程分解为一系列微操作,每个微操作对应一条微指令,微指令序列存储在控制存储器中。
执行机器指令时:
- 从控制存储器中取出微指令
- 微指令解释产生控制信号
- 执行微操作
- 根据微指令的下址字段取出下一条微指令
2. 微指令格式
微指令包括两个主要字段:
- 控制字段:直接产生控制信号,或选择产生控制信号的方式
- 下址字段:指明下一条微指令的地址
微指令格式设计:
- 水平型微指令:每一位对应一个控制信号,效率高但微指令字长
- 垂直型微指令:编码表示微操作,字长短但执行速度慢
3. 微程序结构
微程序通常包括:
- 取指微程序:所有指令的公共操作
- 指令微程序:每条指令对应的微程序
- 中断处理微程序
- 异常处理微程序
4. 顺序控制
微程序的顺序控制方式:
- 顺序转移:下址字段 = 当前地址 + 1
- 条件转移:根据标志位或指令特征码选择下一地址
- 转子程序:调用微子程序(微地址入栈)
- 返回:微子程序返回
5. 微程序控制的优缺点
优点:
- 规整性好,设计相对简单
- 修改容易,指令集变更时只需修改微程序
- 调试方便,可以单步跟踪微指令执行
缺点:
- 执行速度慢,需要访问控制存储器
- 硬件成本高,需要额外的控制存储器
- 不适合高速处理器
现代CISC处理器(如x86)仍采用微程序控制,而RISC处理器通常采用硬布线控制。
5.4.4 两种控制方式的比较
| 特性 | 硬布线控制 | 微程序控制 |
|---|---|---|
| 执行速度 | 快 | 慢 |
| 设计难度 | 高 | 低 |
| 修改难度 | 高 | 低 |
| 可维护性 | 差 | 好 |
| 适用场景 | RISC处理器、高速处理器 | CISC处理器、复杂指令集 |
| 电路规模 | 组合逻辑较大 | 需要控制存储器 |
| 可靠性 | 较高 | 较低(控制存储器可能出错) |
现代处理器的控制单元设计趋向于结合两种方式的优点:
- 对于常用指令采用硬布线控制,保证速度
- 对于复杂指令或微码ROM可更新情况采用微程序控制,保持灵活性
5.5 典型处理器分析
5.5.1 简单处理器实例
以简化的MIPS处理器为例,说明处理器的实现方法。
1. 数据通路设计
简化MIPS数据通路包括:
- 指令存储器:存放程序代码
- 数据存储器:存放程序数据
- 寄存器堆:32个通用寄存器
- ALU:算术逻辑运算单元
- PC:程序计数器
- 必要的多路选择器和控制逻辑
支持的指令类型:
- R型:add, sub, and, or, slt
- I型:lw, sw, beq
- J型:j
2. 控制信号设计
主要的控制信号包括:
| 控制信号 | 功能 |
|---|---|
| RegDst | 选择目标寄存器号(0=rt, 1=rd) |
| Jump | 是否为跳转指令 |
| Branch | 是否为分支指令 |
| MemRead | 读存储器信号 |
| MemtoReg | 写回数据选择(0=ALU结果, 1=存储器) |
| ALUOp | ALU操作选择 |
| MemWrite | 写存储器信号 |
| ALUSrc | ALU第二操作数选择(0=寄存器, 1=立即数) |
| RegWrite | 写寄存器信号 |
3. ALU控制
ALU需要根据指令类型和功能码确定操作:
| 指令 | ALUOp | 功能码 | ALU操作 |
|---|---|---|---|
| add | 00 | — | 010(加) |
| sub | 00 | — | 110(减) |
| and | 00 | — | 000(与) |
| or | 00 | — | 001(或) |
| slt | 00 | — | 111(less) |
| beq | 01 | — | 110(减,比较) |
| lw/sw | 00 | — | 010(加,计算地址) |
4. 主控制单元真值表
以R型指令-add为例(opcode=000000,funct=100000):
- RegDst=1, Jump=0, Branch=0, MemRead=0, MemtoReg=0, ALUOp=00, MemWrite=0, ALUSrc=0, RegWrite=1
- 其他指令类似
5.5.2 流水线处理器实例
1. 流水线数据通路
在简单处理器基础上加入流水线寄存器:
- IF/ID寄存器:保存取出的指令和PC+4
- ID/EX寄存器:保存译码结果、操作数、立即数等
- EX/MEM寄存器:保存ALU结果、访存数据、写回寄存器号等
- MEM/WB寄存器:保存访存结果、写回寄存器号等
2. 控制信号传递
流水线的控制信号需要通过流水线寄存器传递到相应阶段:
- IF阶段:PCSrc(分支决策)
- ID阶段:所有控制信号在此产生
- EX阶段:ALUOp, ALUSrc, RegDst
- MEM阶段:Branch, MemRead, MemWrite
- WB阶段:RegWrite, MemtoReg
3. 冒险处理
- 数据冒险:使用转发路径和加载互锁
- 控制冒险:使用分支预测和延迟槽
5.5.3 现代高性能处理器特点
1. 多发射技术
现代处理器采用多发射技术,在一个时钟周期内发射多条指令:
- 静态多发射:编译器打包指令,VLIW
- 动态多发射:硬件动态调度,超标量
2. 乱序执行
乱序执行(Out-of-Order Execution)允许指令不按程序顺序执行,只要不违反数据依赖:
- 指令队列(Reorder Buffer,ROB)
- 寄存器重命名
- 寄存器映射表(Register Alias Table,RAT)
3. 分支预测
高性能处理器采用复杂的分支预测:
- 多级BTB
- 全局和局部历史预测器
- 感知分支方向和目标
- 分支目标缓存(Return Stack)
4. Cache层次
高速缓存对处理器性能至关重要:
- L1指令Cache和数据Cache分离
- L2和L3 Cache提供更大容量
- 预取技术减少缓存 miss
- 多端口Cache支持多发射
5. 多核处理器
现代处理器大多是 multicore设计:
- 共享或独立Cache
- 片上互连网络
- 一致性协议(MESI等)
- 同步原语
5.5.4 处理器发展趋势
1. 指令级并行(ILP)的极限
- ILP受限于程序固有依赖和硬件资源
- 乱序执行和超标量的收益递减
- 功耗成为主要瓶颈
2. 线程级并行(TLP)
- 多核处理器通过线程级并行提高性能
- 挖掘程序的并行性是软件的责任
- 需要更好的编程模型和工具
3. 数据级并行(DLP)
- SIMD指令(AVX, NEON等)
- GPU计算
- 矢量处理器的复兴
4. 专用处理器
- 特定领域处理器(DSA)
- 神经网络处理器(NPU)
- 图形处理器(GPU)通用化
本章小结
本章围绕中央处理器的设计与实现,系统介绍了处理器数据通路、指令流水线、流水线冒险以及控制方式等核心内容。
处理器数据通路是数据流动的物理路径,包括运算单元、寄存器组和控制单元。处理器通过指令的分阶段执行完成计算功能,经典的五级流水线将指令执行分为取指、译码、执行、访存和写回五个阶段。
流水线技术通过重叠指令执行阶段来提高处理器吞吐量,但需要处理结构冒险、数据冒险和控制冒险三类问题。数据冒险可以通过转发技术和加载互锁来处理,控制冒险主要依赖分支预测技术。
控制单元负责生成指令执行所需的控制信号,硬布线控制和微程序控制是两种主要的实现方式。RISC处理器多采用硬布线控制以获得更高的执行速度,而CISC处理器则采用微程序控制来保持灵活性和兼容性。
现代高性能处理器采用多发射、乱序执行、精密分支预测等技术,在指令级并行、线程级并行和数据级并行三个层面挖掘程序的并行性。
作业题
作业p201 - 6
6. 假设某机器有 80 条指令,平均每条指令由 4 条微指令组成,其中有一条取指微指令是所有指令共用的。已知微指令长度为 32 位,请估算控制存储器容量。
🛠️ 核心概念与破题逻辑
在微程序控制器中,CPU 的每一条机器指令(比如 ADD、MOV),在底层其实都是通过执行一段微程序来实现的。而微程序就像是一段代码,是由若干条微指令组成的。
这些底层的微指令,全部被提前固化在 CPU 内部的一个专属小仓库里,这个仓库就叫控制存储器(CM, Control Memory)。
要算控制存储器的总容量,本质上就像算一个矩阵的面积,核心公式非常固定:
题目中微指令长度已知为 \(32\text{位}\),因此整个题目的唯一难点和破题关键,就在于精准求出控制存储器里究竟存了多少条互不相同的微指令。这里需要注意“公共复用”的扣除。
🏃♂️ 详细解题步骤
第一步:分析单条指令的微指令构成
题目指出,平均每条机器指令由 4 条微指令组成。但其中有 1 条“取指微指令”是所有机器指令公共共用的。 这意味着,每条指令在控制存储器里,真正属于自己独占、不与别人共享的执行微指令平均只有:
第二步:计算所有指令独占的微指令总数
系统总共有 80 条机器指令,它们各自独占的微指令在控制存储器里必须分别开辟空间存放,不能重叠,总共是:
第三步:合并计算微指令的实际物理总条数
最后,我们必须把那 1 条默默在后台被所有人共用的“取指微指令”加回来。这才是控制存储器里真正要存储的总物理行数:
第四步:代入容量公式求总容量
将算出的总条数 \(241\) 条与单条微指令的长度 \(32\text{位}\) 相乘,即可得到控制存储器的总容量:
为了让答案更符合工业常规表达,我们可以将其转化为字节(Byte)单位:
📌 最终答案:
该机器控制存储器的规格为 \(241 \times 32\text{位}\),总容量约为 \(7712\text{位}\)(或 \(964\text{B}\))。
作业p201 - 8
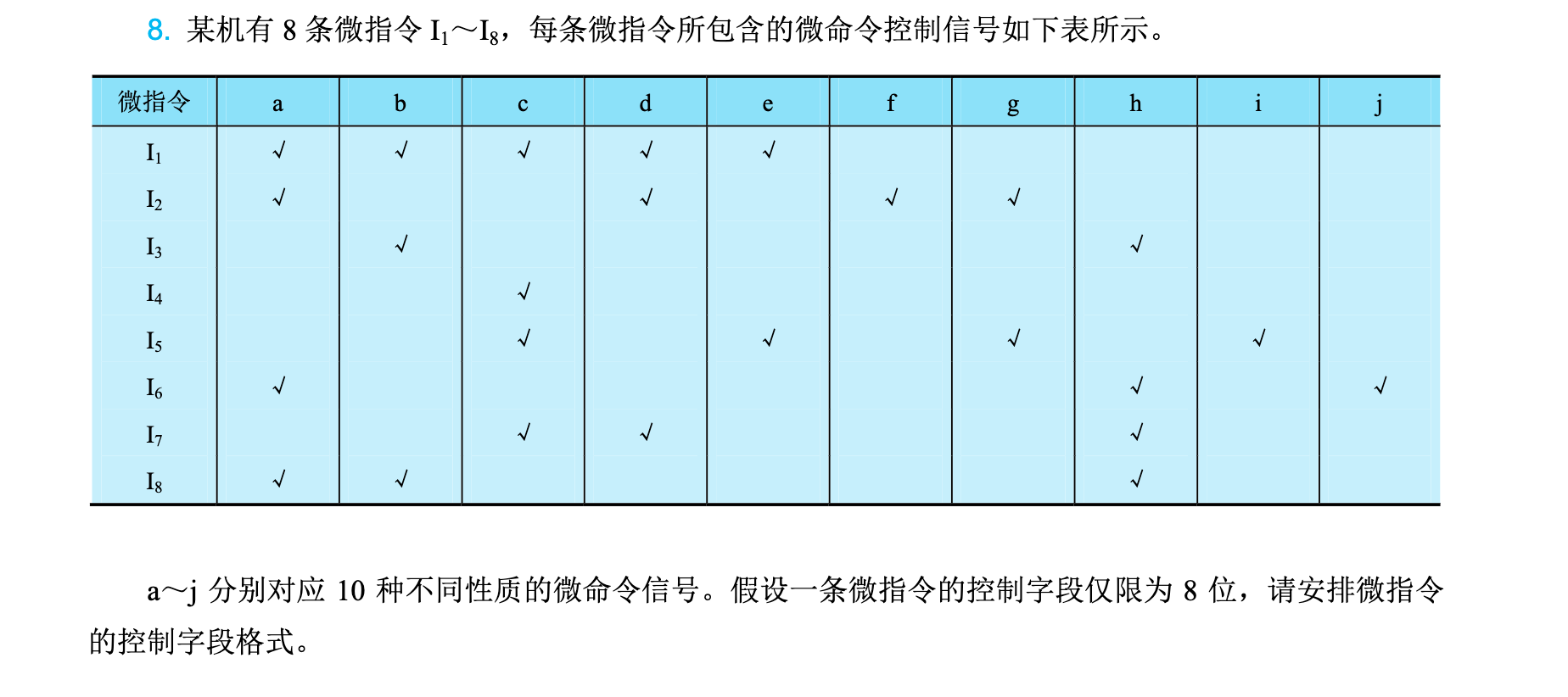
这道题目很简单,我就自己总结了,就是微指令信号数,大于控制字段,需要把指令不发生冲突的微指令放在同一组,共享控制字段,而剩下的互斥的就各自为一组,然后这么多组把字段用完即可
因为分组,所以答案不唯一,所以我觉得做这题解析没有意义,但是做这一题可以,辅助理解微指令编码
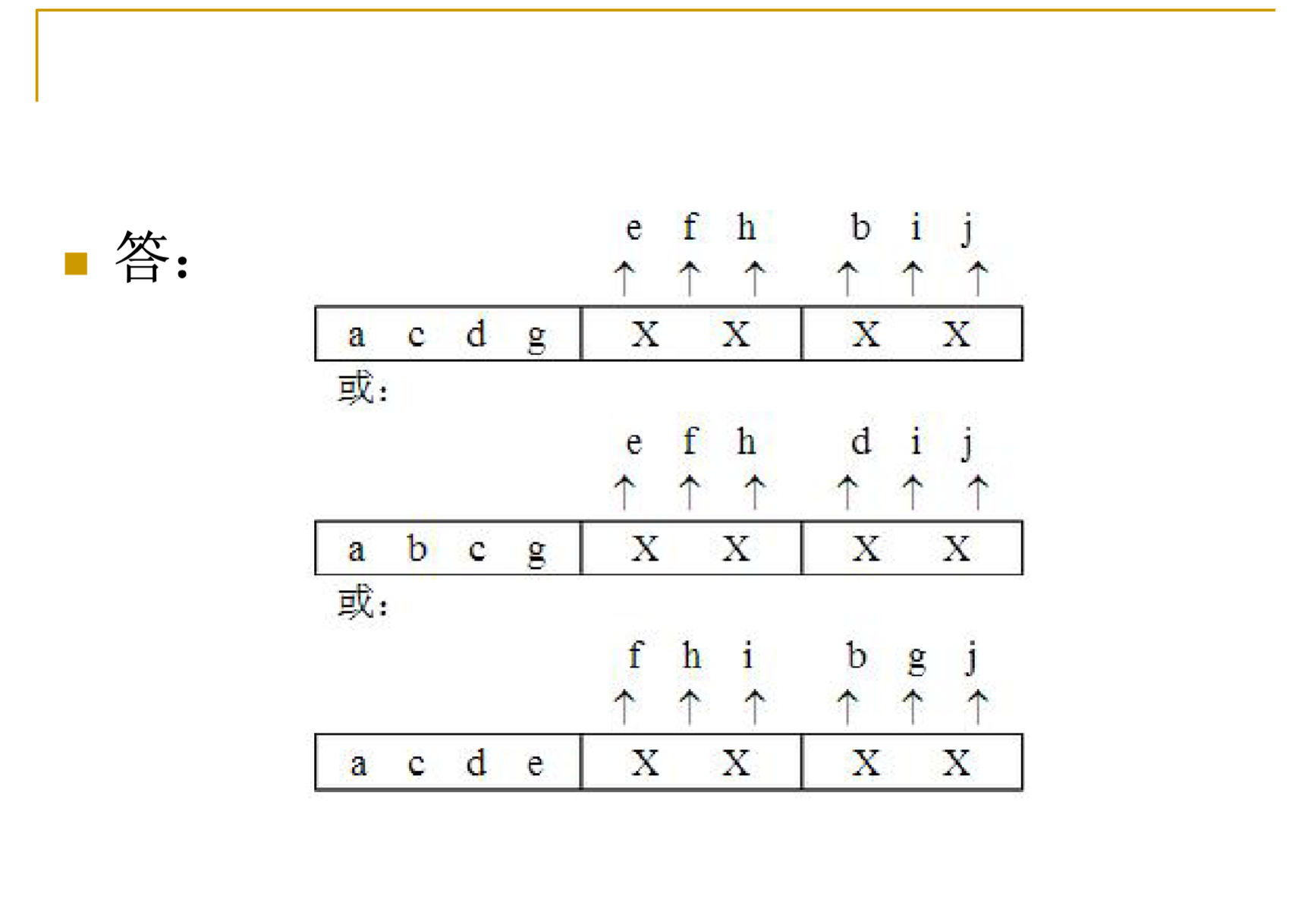
以答案的第一个解为例,分组就是{e,f,h},{b,i,j},以及a,c,d各自为一组
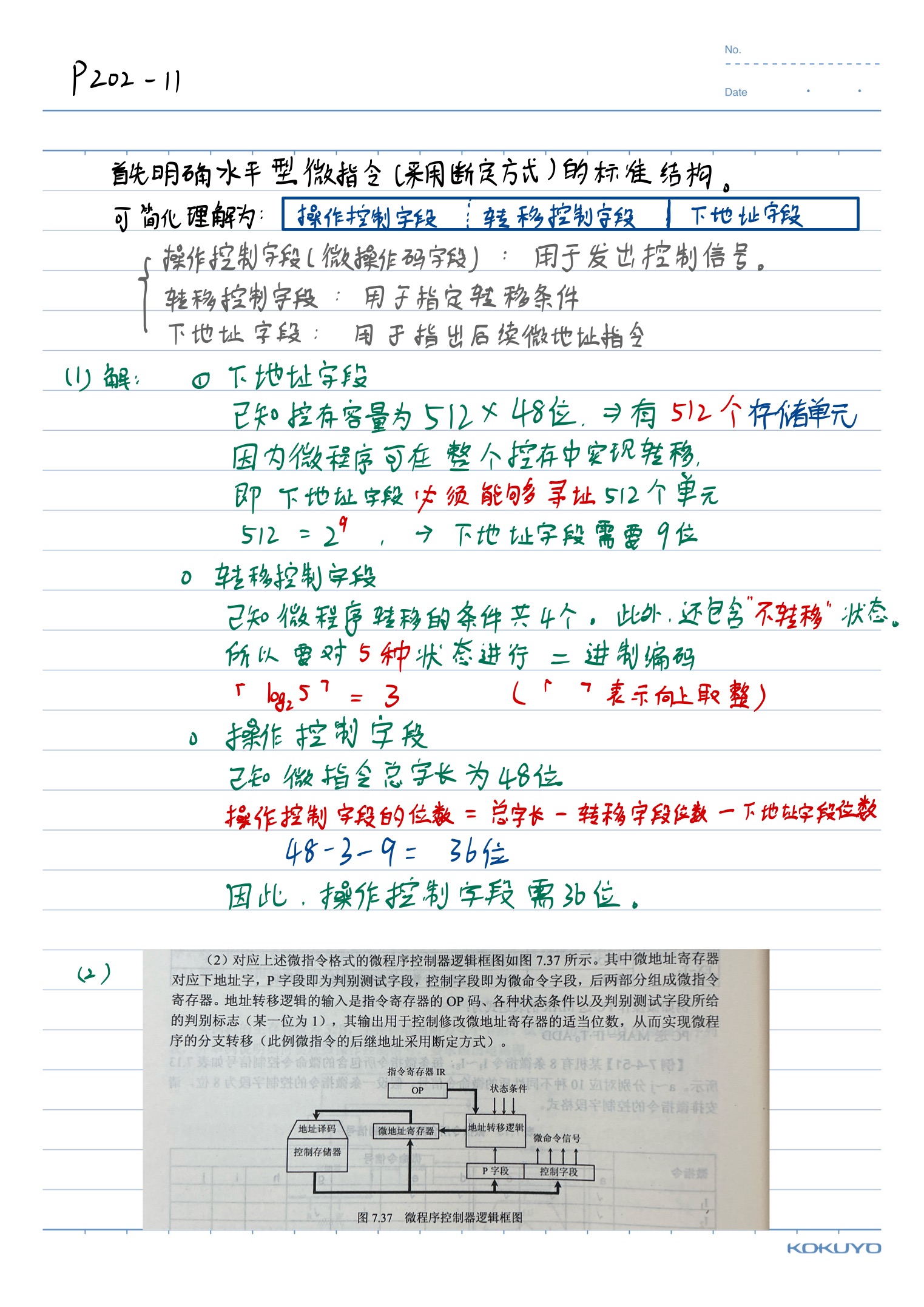
作业p202 - 11

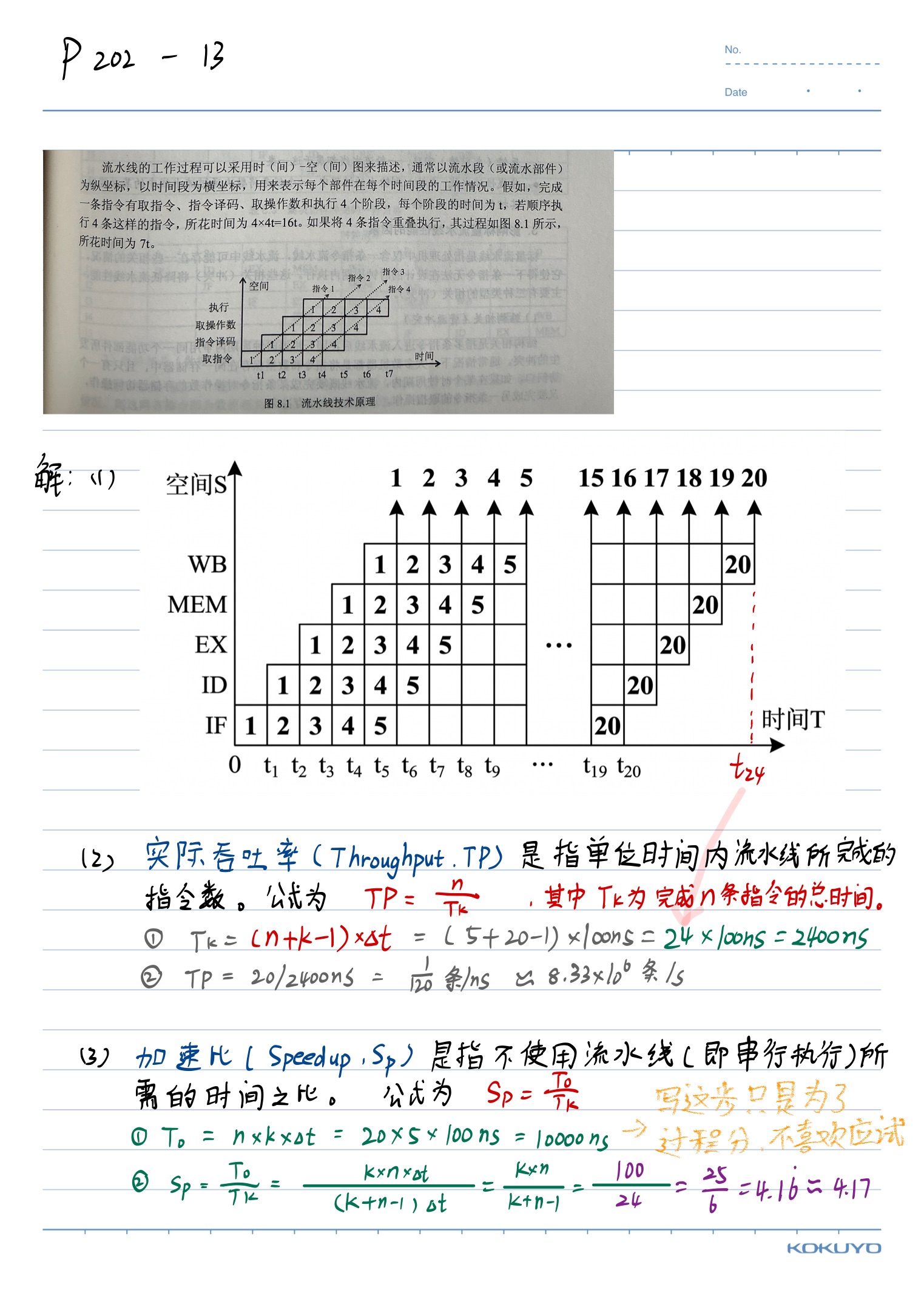
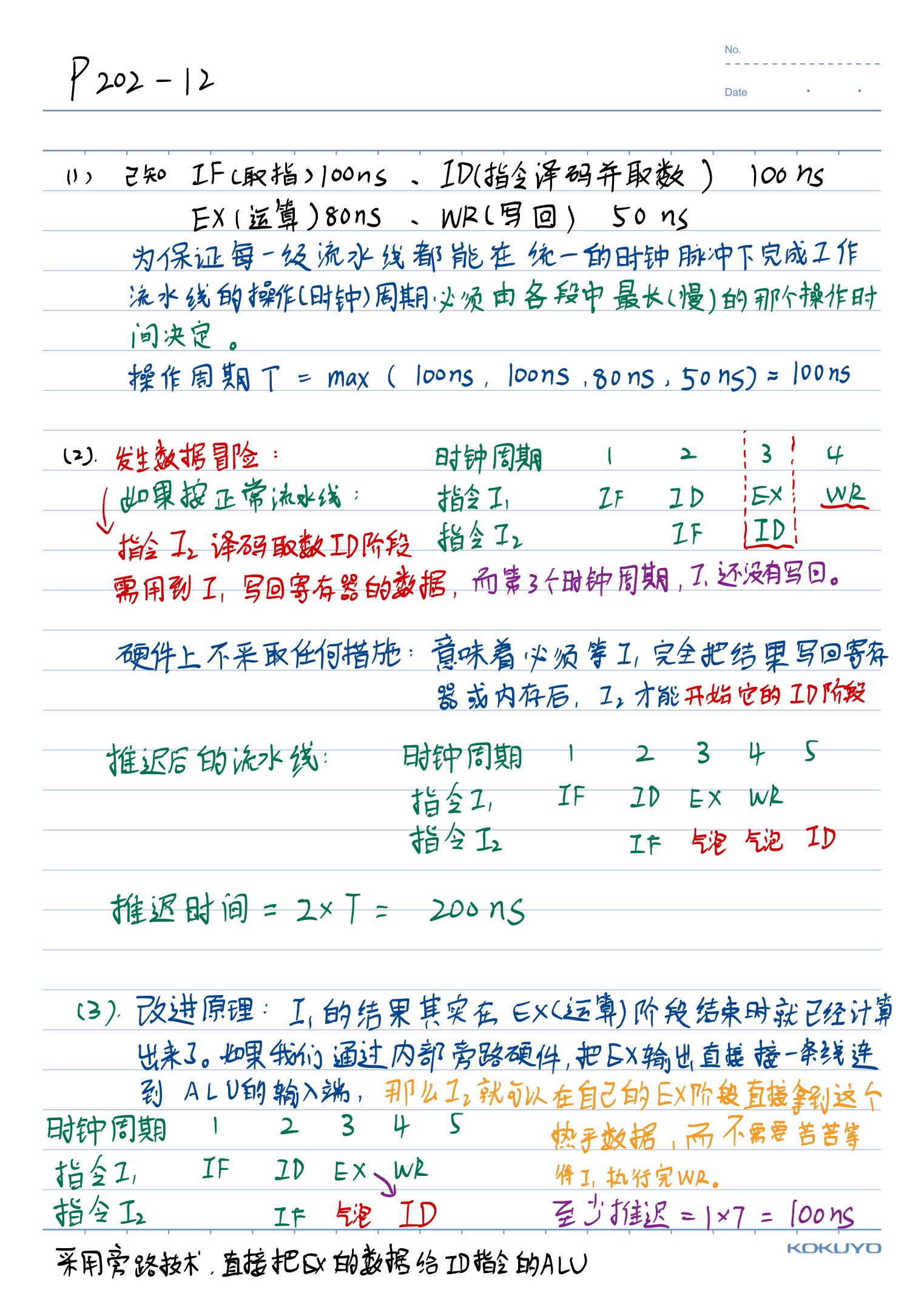
作业p202 - 12

作业p202 - 13